In the CST BabyBot Tutorial we will model infant behavior using cognitive architectures!
We will use a Docker-based environment that integrates:
- CST – Cognitive Systems Toolkit (Java-based)
- MIMo – Multimodal Infant Model Simulator
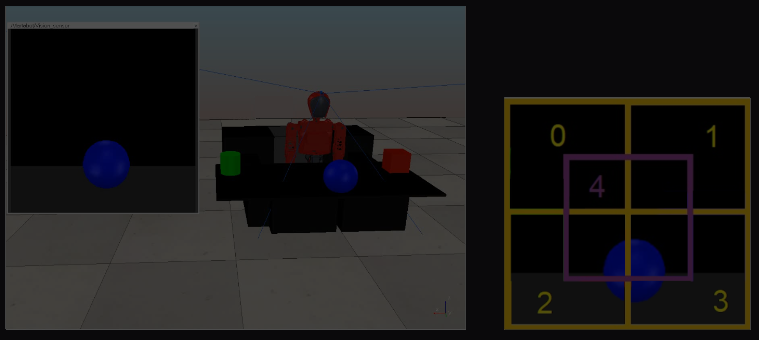
- CoppeliaSim – Robot Simulator
The environment supports simulation, real-time visualization (via noVNC), and bidirectional communication between CST and the simulators.
🚼 About the Tutorial
Programming a BabyBot: Foundations for a Newborn Robot
This full-day hands-on tutorial guides participants in building a cognitive system that simulates Piaget’s first sensorimotor substage. Through four sessions, attendees will learn and implement cognitive modules related to sensory processing, perception, and selective attention, using the CST architecture.
Participants will gain practical experience in implementing a biologically inspired cognitive agent that models early intelligence through interaction with its environment. The tutorial is ideal for students and researchers in AI, robotics, and cognitive science.
💼 What You’ll Need
- A laptop with Docker and git installed
- Basic familiarity with Linux command line and programming logic
- An interest in cognitive modeling, robotics, or developmental systems
We will provide all additional resources, including the Docker image, project files, and usage instructions.
📋 Confirm Your Participation
Please help us plan better by confirming your attendance in ICDL using the link below:
→ Confirm ICDL Attendance via Forms
👷🏼♀️ Organizers





📍 Location
The tutorial will take place at the Faculty of Electrical Engineering CVUT in Prague
Technicka 1902/2, Prague 6 – Dejvice, Prague, Czech Republic
📘 Site Sections
Website Authors: @leolellisr and @cepcamargo
This site is a work in progress. Feel free to reach out with questions or suggestions using the contact icons in the footer.
📚 Projects with CST
-
-
Drives and Impulses - Shaping Motivation and Procedural Learning for Humanoid Robots
 Work published in 2024 IEEE International Conference on Development and Learning (ICDL). This paper addresses our initial experiments exploring the acquired behavior by a simulated humanoid agent using two different motivational systems - drives and impulses - guiding the decision making process as part of the cognitive architecture. [Read More]
Work published in 2024 IEEE International Conference on Development and Learning (ICDL). This paper addresses our initial experiments exploring the acquired behavior by a simulated humanoid agent using two different motivational systems - drives and impulses - guiding the decision making process as part of the cognitive architecture. [Read More] -
Repository - Attention Trail
 Repository with modules available for an attentional system based on the selection model for perception proposed by Colombini (2016). The modules were implemented with CST. [Read More]
Repository with modules available for an attentional system based on the selection model for perception proposed by Colombini (2016). The modules were implemented with CST. [Read More] -
Paper - A Procedural Constructive Learning Mechanism with Deep Reinforcement Learning for Cognitive Agents
 Work published in 2024 at JINT Journal of Intelligent & Robotic Systems. presents a learning strategy that amalgamates deep reinforcement learning with procedural learning, mirroring the incremental learning process observed in human sensorimotor development. This approach is embedded within the CONAIM cognitive-attentional architecture, leveraging the cognitive tools of CST. [Read More]
Work published in 2024 at JINT Journal of Intelligent & Robotic Systems. presents a learning strategy that amalgamates deep reinforcement learning with procedural learning, mirroring the incremental learning process observed in human sensorimotor development. This approach is embedded within the CONAIM cognitive-attentional architecture, leveraging the cognitive tools of CST. [Read More] -
Repository - PhD project page - CogScore
 PhD project page. CogScore - An Online Evaluation Playground For Cognitive Architectures With Developmental Robotics. This work aims to present a general framework for the automated evaluation of different levels of diverse cognitive capabilities of cognitive architectures. [Read More]
PhD project page. CogScore - An Online Evaluation Playground For Cognitive Architectures With Developmental Robotics. This work aims to present a general framework for the automated evaluation of different levels of diverse cognitive capabilities of cognitive architectures. [Read More]