My First World Machine#
World Machine is a research project that investigates the concept and creation of computational world models. It is also the name for the project architecture and training protocol.
In this example, we will create a World Machine and train it on an example dataset.
Let’s start by importing the world_machine package and other required modules:
[1]:
try:
import world_machine
except:
!python3 -m pip install world_machine
[ ]:
import matplotlib.pyplot as plt
import seaborn as sns
import torch
import world_machine as wm
And by checking if there is an available GPU. This will speed up the example training and evaluation:
[3]:
device = 'cuda' if torch.cuda.is_available() else 'cpu'
Creating our Dataset#
For this example, we will create a model that learns the behavior of a sine function and predicts its future values. We define the data, creating our time vector, and defining random phases and frequencies:
[4]:
t = torch.linspace(0, 99, 100)
phase = torch.lerp(torch.tensor(0.0), torch.tensor(2*torch.pi), torch.rand(1000))
frequency = torch.lerp(torch.tensor(0.1), torch.tensor(1.0), torch.rand(1000))
x = frequency[:, None] * t[None, :]
x += phase[:, None]
data = torch.sin(x)
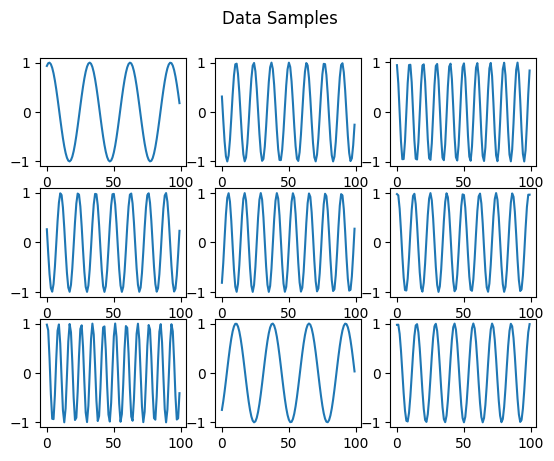
We can plot some dataset samples:
[5]:
fig, axs = plt.subplots(3, 3)
axs_flat = axs.flatten()
for i in range(9):
axs_flat[i].plot(data[i])
plt.suptitle("Data Samples")
[5]:
Text(0.5, 0.98, 'Data Samples')
To train a World Machine using our data, we need to create a WorldMachineDataset. It has methods for loading our data in the format the model and protocol expect. We are going to make a dataset with only one sensory channel named “data” that contains our sine signal:
[6]:
class FirstDataset(wm.data.WorldMachineDataset):
def __init__(self, data:torch.Tensor):
super().__init__(sensory_channels=["data"],
size=len(data))
self._data = data
def get_channel_item(self, channel, index):
if channel == "data":
x = self._data[index]
y = torch.roll(self._data[index], -1)
return x[:-1].unsqueeze(1), y[:-1].unsqueeze(1)
[7]:
train_dataset = FirstDataset(data[:700])
val_dataset = FirstDataset(data[700:])
Then, we create dataloaders for our data:
[8]:
batch_size = 32
dataloaders = {"train":wm.data.WorldMachineDataLoader(train_dataset, batch_size, shuffle=True, drop_last=True),
"val":wm.data.WorldMachineDataLoader(val_dataset, batch_size, shuffle=True, drop_last=True)}
We can inspect one batch. Observe that the data is structured using PyTorch’s TensorDict:
[9]:
next(iter(dataloaders["train"]))
[9]:
TensorDict(
fields={
index: Tensor(shape=torch.Size([32]), device=cpu, dtype=torch.int64, is_shared=False),
inputs: TensorDict(
fields={
data: Tensor(shape=torch.Size([32, 99, 1]), device=cpu, dtype=torch.float32, is_shared=False)},
batch_size=torch.Size([32, 99]),
device=None,
is_shared=False),
targets: TensorDict(
fields={
data: Tensor(shape=torch.Size([32, 99, 1]), device=cpu, dtype=torch.float32, is_shared=False)},
batch_size=torch.Size([32, 99]),
device=None,
is_shared=False)},
batch_size=torch.Size([32]),
device=None,
is_shared=False)
Model Definition#
[10]:
state_size = 32
builder = wm.WorldMachineBuilder(state_size=state_size,
max_context_size=99,
positional_encoder_type="alibi")
builder.state_activation = "tanh"
After defining the basic parameters, we need to define our sensory channels. In our case, the dataset has only one sensory channel, “data”. We also define the encoders and decoders of this channel. The encoded channel will have a size of 10.
[11]:
data_encoded_size = 10
builder.add_sensory_channel(channel_name="data",
channel_size=data_encoded_size,
encoder=wm.layers.PointwiseFeedforward(input_dim=1, hidden_size=2*state_size, output_dim=data_encoded_size),
decoder=wm.layers.PointwiseFeedforward(input_dim=state_size, hidden_size=2*state_size, output_dim=1))
Then we can define our blocks. We are going to use two sensory blocks. One is conditioned on the “data” channel, and the other on the “latent world state” as it was at the start of the temporal step:
[12]:
builder.add_block(count=1,
sensory_channel="data",
n_attention_head=2)
builder.add_block(count=1,
sensory_channel="state",
n_attention_head=2)
Finally, we can build our model:
[13]:
model = builder.build()
Training#
The first step to training is defining our criterions. In this case, we are going to train using an MSE criterion computed on the predictions of our only “data” sensory channel:
[14]:
cs = wm.train.CriterionSet()
cs.add_sensory_criterion(name="mse",
sensory_channel="data",
criterion=torch.nn.MSELoss(),
train=True)
Then, we define our training stages. They operate in callbacks during training, performing diverse operations. The first stages we are going to add are the StateManager, which implements the state discovery process and enables model training, and SensoryMasker, which allows the model to handle the absence of sensory data. Both are essential for the model:
[15]:
stages = []
stages.append(wm.train.stages.StateManager())
stages.append(wm.train.stages.SensoryMasker(mask_percentage=wm.train.UniformScheduler(low_value=0,
high_value=1,
n_epoch=0)))
The following stages are SequenceBreaker, ShortTimeRecaller, and NoiseAdder. They perform operations that can improve the model’s performance:
[16]:
stages.append(wm.train.stages.SequenceBreaker(n_segment=2, fast_forward=True))
stages.append(wm.train.stages.ShortTimeRecaller(
channel_sizes={"data":1},
criterions={"data":torch.nn.MSELoss()},
n_past=5,
n_future=5,
stride_past=3,
stride_future=3
))
stages.append(wm.train.stages.NoiseAdder(
means={"data":0.0},
stds={"data":0.1},
mins={"data":-1,},
maxs={"data":1.0}
))
EarlyStopper saves an intermediary model at the best epoch. The final model will have the weights of this epoch. It doesn’t interrupt the training.
[17]:
stages.append(wm.train.stages.EarlyStopper())
We will use AdamW as an optimizer. We will also use Cosine Annealing with Warmup to schedule our learning rate:
[18]:
initial_lr = 0.002
T_mult = 1
T0 = 5
optimizer = torch.optim.AdamW(model.parameters(), lr=initial_lr)
scheduler = torch.optim.lr_scheduler.CosineAnnealingWarmRestarts(optimizer, T0, T_mult)
stages.append(wm.train.stages.LRScheduler_Step(scheduler=scheduler))
Finally, we can create our Trainer with the defined criterions and stages, and train our model for 20 epochs:
[19]:
trainer = wm.train.Trainer(criterion_set=cs, stages=stages)
[20]:
model = model.to(device)
[21]:
train_history = trainer(wm=model,
dataloaders=dataloaders,
optimizer=optimizer,
n_epoch=20)
100%|██████████| 9/9 [00:00<00:00, 15.98it/s]
VAL Epoch [0/20], Loss: 0.3791
100%|██████████| 21/21 [00:03<00:00, 5.72it/s]
Epoch [1/20], Loss: 0.2650, Elapsed Time: 3.68 sec
100%|██████████| 9/9 [00:00<00:00, 44.05it/s]
VAL Epoch [1/20], Loss: 0.2643
100%|██████████| 21/21 [00:01<00:00, 17.74it/s]
Epoch [2/20], Loss: 0.2391, Elapsed Time: 1.19 sec
100%|██████████| 9/9 [00:00<00:00, 44.13it/s]
VAL Epoch [2/20], Loss: 0.1644
100%|██████████| 21/21 [00:01<00:00, 17.16it/s]
Epoch [3/20], Loss: 0.1699, Elapsed Time: 1.23 sec
100%|██████████| 9/9 [00:00<00:00, 44.54it/s]
VAL Epoch [3/20], Loss: 0.1028
100%|██████████| 21/21 [00:01<00:00, 16.54it/s]
Epoch [4/20], Loss: 0.1534, Elapsed Time: 1.28 sec
100%|██████████| 9/9 [00:00<00:00, 41.40it/s]
VAL Epoch [4/20], Loss: 0.1032
100%|██████████| 21/21 [00:01<00:00, 17.05it/s]
Epoch [5/20], Loss: 0.1435, Elapsed Time: 1.24 sec
100%|██████████| 9/9 [00:00<00:00, 38.23it/s]
VAL Epoch [5/20], Loss: 0.0870
100%|██████████| 21/21 [00:01<00:00, 17.49it/s]
Epoch [6/20], Loss: 0.1438, Elapsed Time: 1.21 sec
100%|██████████| 9/9 [00:00<00:00, 42.00it/s]
VAL Epoch [6/20], Loss: 0.0507
100%|██████████| 21/21 [00:01<00:00, 17.07it/s]
Epoch [7/20], Loss: 0.1223, Elapsed Time: 1.25 sec
100%|██████████| 9/9 [00:00<00:00, 37.87it/s]
VAL Epoch [7/20], Loss: 0.0499
100%|██████████| 21/21 [00:01<00:00, 17.52it/s]
Epoch [8/20], Loss: 0.1155, Elapsed Time: 1.21 sec
100%|██████████| 9/9 [00:00<00:00, 39.03it/s]
VAL Epoch [8/20], Loss: 0.0200
100%|██████████| 21/21 [00:01<00:00, 16.65it/s]
Epoch [9/20], Loss: 0.0986, Elapsed Time: 1.27 sec
100%|██████████| 9/9 [00:00<00:00, 44.25it/s]
VAL Epoch [9/20], Loss: 0.0154
100%|██████████| 21/21 [00:01<00:00, 16.83it/s]
Epoch [10/20], Loss: 0.0823, Elapsed Time: 1.26 sec
100%|██████████| 9/9 [00:00<00:00, 43.13it/s]
VAL Epoch [10/20], Loss: 0.0232
100%|██████████| 21/21 [00:01<00:00, 16.64it/s]
Epoch [11/20], Loss: 0.0756, Elapsed Time: 1.27 sec
100%|██████████| 9/9 [00:00<00:00, 45.19it/s]
VAL Epoch [11/20], Loss: 0.0255
100%|██████████| 21/21 [00:01<00:00, 17.38it/s]
Epoch [12/20], Loss: 0.0542, Elapsed Time: 1.22 sec
100%|██████████| 9/9 [00:00<00:00, 43.34it/s]
VAL Epoch [12/20], Loss: 0.0122
100%|██████████| 21/21 [00:01<00:00, 16.70it/s]
Epoch [13/20], Loss: 0.0495, Elapsed Time: 1.27 sec
100%|██████████| 9/9 [00:00<00:00, 43.40it/s]
VAL Epoch [13/20], Loss: 0.0097
100%|██████████| 21/21 [00:01<00:00, 18.14it/s]
Epoch [14/20], Loss: 0.0441, Elapsed Time: 1.17 sec
100%|██████████| 9/9 [00:00<00:00, 39.84it/s]
VAL Epoch [14/20], Loss: 0.0097
100%|██████████| 21/21 [00:01<00:00, 17.96it/s]
Epoch [15/20], Loss: 0.0403, Elapsed Time: 1.18 sec
100%|██████████| 9/9 [00:00<00:00, 47.19it/s]
VAL Epoch [15/20], Loss: 0.0090
100%|██████████| 21/21 [00:01<00:00, 18.79it/s]
Epoch [16/20], Loss: 0.0390, Elapsed Time: 1.13 sec
100%|██████████| 9/9 [00:00<00:00, 46.74it/s]
VAL Epoch [16/20], Loss: 0.0088
100%|██████████| 21/21 [00:01<00:00, 18.08it/s]
Epoch [17/20], Loss: 0.0304, Elapsed Time: 1.17 sec
100%|██████████| 9/9 [00:00<00:00, 47.40it/s]
VAL Epoch [17/20], Loss: 0.0104
100%|██████████| 21/21 [00:01<00:00, 18.33it/s]
Epoch [18/20], Loss: 0.0291, Elapsed Time: 1.15 sec
100%|██████████| 9/9 [00:00<00:00, 42.70it/s]
VAL Epoch [18/20], Loss: 0.0081
100%|██████████| 21/21 [00:01<00:00, 16.83it/s]
Epoch [19/20], Loss: 0.0266, Elapsed Time: 1.26 sec
100%|██████████| 9/9 [00:00<00:00, 44.56it/s]
VAL Epoch [19/20], Loss: 0.0072
100%|██████████| 21/21 [00:01<00:00, 17.83it/s]
Epoch [20/20], Loss: 0.0270, Elapsed Time: 1.19 sec
100%|██████████| 9/9 [00:00<00:00, 39.71it/s]
VAL Epoch [20/20], Loss: 0.0079
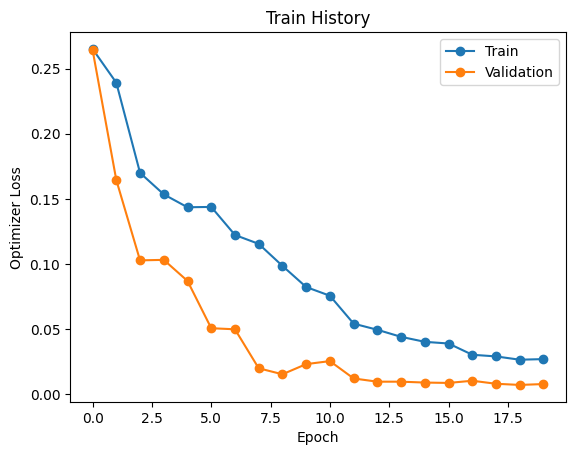
We can see the training loss during training:
[22]:
plt.plot(train_history["optimizer_loss_train"], "o-", label="Train")
plt.plot(train_history["optimizer_loss_val"], "o-", label="Validation")
plt.xlabel("Epoch")
plt.ylabel("Optimizer Loss")
plt.legend()
plt.title("Train History")
[22]:
Text(0.5, 1.0, 'Train History')
Finally, let’s ensure that only the intermediary model is deleted. In a typical script (not a Jupyter Notebook), this is not necessary:
[ ]:
wm.train.stages.EarlyStopper._delete_files()
And also ensure that the states used during training are also deleted (again, only because we are running in a Jupyter Notebook):
[ ]:
train_dataset.clear_states()
val_dataset.clear_states()
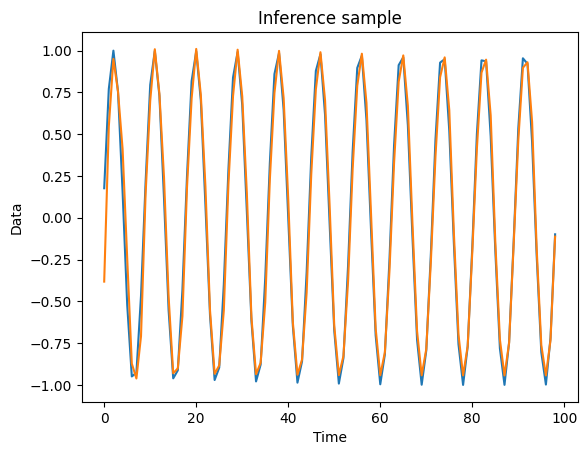
Inference#
For inferencing with the model, we need to define our initial state and use the inference method, passing in our sensory data as well. It is the “inputs” element of the dataloader item.
[23]:
item = next(iter(dataloaders["val"]))
[25]:
state = torch.zeros([batch_size, 99, state_size], device=device)
output = model.inference(state=state,
sensory_data=item["inputs"])
[26]:
data_pred = output["data"].cpu().detach()
[28]:
plt.plot(item["targets"]["data"][0])
plt.plot(data_pred[0])
plt.xlabel("Time")
plt.ylabel("Data")
plt.title("Inference sample")
[28]:
Text(0.5, 1.0, 'Inference sample')
Evaluating the model#
We will evaluate our model’s performance on the defined evaluation tasks. We start by creating our MetricsGenerator using our criterions:
[29]:
mg = wm.evaluate.MetricsGenerator(cs)
We can then compute the model metrics:
[30]:
metrics = mg(model, dataloaders["val"])
Metrics Generation: 100%|██████████| 9/9 [00:12<00:00, 1.36s/it]
Plotting our metrics, we can see that the Prediction Shallow is one of the most challenging tasks, and Normal is the easiest:
[36]:
metrics_optimizer = {name.replace("_", "\n"):metrics[name]["optimizer_loss"] for name in metrics}
sns.barplot(metrics_optimizer)
plt.title("Performance Across Tasks")
plt.xlabel("Task")
plt.ylabel("MSE")
plt.yscale("log")

Let’s also see some inference samples. For that, we are going to use a subsample of only one batch:
[73]:
small_dataset = val_dataset
small_dataset, _ = torch.utils.data.random_split(small_dataset, [32, len(small_dataset)-32])
small_dataloader = wm.data.WorldMachineDataLoader(small_dataset, batch_size=32, shuffle=False)
[74]:
_, logits = mg(model, small_dataloader, return_logits=True)
Metrics Generation: 0%| | 0/1 [00:00<?, ?it/s]Metrics Generation: 100%|██████████| 1/1 [00:01<00:00, 1.57s/it]
[75]:
logits["targets"] = []
for item in small_dataloader:
item["targets"]["state"] = torch.roll(item["inputs"]["state"], -1, 1)
logits["targets"].append(item["targets"])
logits["targets"]
logits["targets"] = torch.cat(logits["targets"], 0)
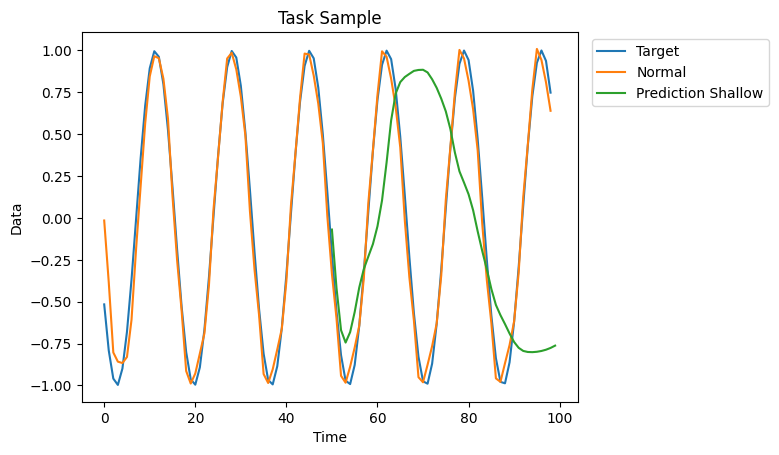
Observe that the performance on the Prediction Shallow tasks is not optimal. We could probably improve performance by changing the model configuration and hyperparameters.
[76]:
plt.plot(logits["targets"]["data"][i], label="Target")
plt.plot(logits["normal"]["data"][i], label="Normal")
plt.plot(range(50,100), logits["prediction_shallow"]["data"][i], label="Prediction Shallow")
plt.legend(bbox_to_anchor=(1.4, 1), loc='upper right')
plt.title("Task Sample")
plt.xlabel("Time")
plt.ylabel("Data")
plt.show()